In high winds I drive a hub down in the ground and then pull it back out and countersink my level rod down in the ground 6-8" and make sure my tripod legs are set firm.
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
New to LS - Many Questions
- Thread starter Aaron S
- Start date
Nate The Surveyor
Well-Known Member
What's the catch?
Well, knowledgable tech support, just a call away. Shawn Billings is very gracious.
The most powerfull gps rtk analysis in the history of gps.
A learning curve. It's not tds.
Where was this thing 20 yrs ago?
Really, there is no catch.
But, major improvements about every 6 wks.
For working in a heavy woods environment, there are commercially available antenna masts, that will let your antenna go much higher. 35', and the like.
Do your best to keep good sky view at the base...
Im typing on my phone. When I get in office, maybe ill look them up. Today is our 19th wedding anniversary. Wife does not feel well, anda few kids sick too, so don't hold your breath for me... I may not make it in.
Well, knowledgable tech support, just a call away. Shawn Billings is very gracious.
The most powerfull gps rtk analysis in the history of gps.
A learning curve. It's not tds.
Where was this thing 20 yrs ago?
Really, there is no catch.
But, major improvements about every 6 wks.
For working in a heavy woods environment, there are commercially available antenna masts, that will let your antenna go much higher. 35', and the like.
Do your best to keep good sky view at the base...
Im typing on my phone. When I get in office, maybe ill look them up. Today is our 19th wedding anniversary. Wife does not feel well, anda few kids sick too, so don't hold your breath for me... I may not make it in.
Aaron S
Active Member
It is possible to do this with the Triumph-LS and Triumph-2. Set up the base, make the Triumph-2 an external receiver on the Triumph-LS. Use your RTN profile to set the Triumph-LS to RTN corrections and collect the point. Then switch to UHF profile and turn off external receiver. Proceed with base rover setup.
Or you could put the LS on the base point with the RTN profile active, collect the point using RTN corrections, then set the base up on the point and start base rover.
Good to know I can do that! I thought worse case I just swap the LS and T2 on the base tripod to get the shot, but the external antenna option means I wouldn't have to disturb the base setup - much better.
Aaron S
Active Member
It seems like with my existing 35 watt radio 1 mile is the typical range. In the open prairie, I could get at least 3 miles, depending on the cover, elevations, etc. But I suppose I'll still need that 35 watts to punch through all the trees and fight for that 1 mile.There are a few customers in your part of the world. The Michigan DNR in the UP are using 1M's and LS's. I know a few others in northeastern MN that are using T2's and LS's.
In extremely heavy tree canopy your radio range will be limited even with a 35 watt. In flat ground in the UP we were only able to get just over a mile. The canopy is just too dense to get the range that most flat landers get.
The key to getting the furthest you can is getting height on your uhf radio antenna. I put my antenna on a round 15' tall level rod set in the center of a cheap aluminum tripod.
Nate The Surveyor
Well-Known Member
Since the Javad radio is broadcasting @1hz again, (I have 35 watt radio), I have not had any trouble with range. I will say that I often use the 1/2 wave antenna, not the 5/8 wave. This seems to penetrate hilly terrain, and trees a little better. I'm sure it helps with work out to 3 miles, but that a 5/8 wave would be better in flat treeless areas. Or, long ranges (3 to 6 miles).
N
N
I will say that I often use the 1/2 wave antenna, not the 5/8 wave.
The 1/2 wave whip antenna (if that is what you are using) has a power rating of 20W so it should not be used with a 35 watt output. If you have the NGP 1/2 wave antenna it has a power rating of 200W so it would be ok.
The 1/2 wave antenna should only do better if it is set up in a location much higher than the rover, for example the top of a hill while the rover is in a valley. In these situations you can angle the ground plane of the 5/8 antenna towards the rover in the valley to improve the range.
Nate is using a custom 1/2 wave antenna, not a Javad antenna.
Nate The Surveyor
Well-Known Member
Thanks Matt. We are the end users of these products. We tend to "use what works". Not even knowing what we are doing, in a technical sense. My 1/2 wave antenna is a left over, from my Legacy E Topcon system. So, it looks like the 200w one you posted above. As I post this, I think about what you said. "angle the ground plane of the 5/8 antenna towards the rover in the valley to improve the range." This kicks my brain to think.... WHAT IF I had a SEMI directional antenna? something like a parabolic antenna? https://www.geckoandfly.com/10213/wireless-router-antenna-distance-coverage-comparison/ I am posting this link, because MOST of the time, we are working in ONE direction from the base. And, if we were behind the parabola, usually it's not real far.
Now, I have a YAGI, that I use on the rover, to pull in a bit more signal.
But, I tend to ASSUME it is too directional, to use on the base.
IF I could get a Parabolic antenna, that offset the signal, to give 150% in front, and 15% to the sides, and 30% behind it, it could be a boon for the woods and mountains we often work. I could also possibly position a parabolic BEHIND the 5/8" gain one, with ground plane...
I have a local radio guy, who is alot of fun. Flys RC planes, and knows alot about radio.
I think I'll discuss our wants, needs, and abilities.
He could possibly cobble something, and then we could test it's signal strength.... he's got the stuff to do it!
Thanks...
N
Now, I have a YAGI, that I use on the rover, to pull in a bit more signal.
But, I tend to ASSUME it is too directional, to use on the base.
IF I could get a Parabolic antenna, that offset the signal, to give 150% in front, and 15% to the sides, and 30% behind it, it could be a boon for the woods and mountains we often work. I could also possibly position a parabolic BEHIND the 5/8" gain one, with ground plane...
I have a local radio guy, who is alot of fun. Flys RC planes, and knows alot about radio.
I think I'll discuss our wants, needs, and abilities.
He could possibly cobble something, and then we could test it's signal strength.... he's got the stuff to do it!
Thanks...
N
You could use a parabolic UHF Antenna to increase the range in one direction but I doubt this would comply with FCC ERP rules. Also most parabolic antenna are very directional (+/- 20 degrees) I believe, so you would have to rotate the antenna to survey points in other directions and wouldn't be well suited for surveying applications.
Last edited:
Nate The Surveyor
Well-Known Member
Hmmm 20 degrees is too directional. thanks
N
N
Aaron S
Active Member
Also:
What is the default map tool (comparable to what's on the Trimble units)? For example, after I key in some points, what's the best way to visually see how they all lay out? I know that many screens include a map, but what's a "best practice"?
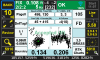
Check out the attached screenshot. I'm still trying to get used to what I'm seeing. If I understand correctly, this one shows the peak-to-peak errors of the 6 RTK engines being 0.108 - What does the 2/2:2 refer to? The 0.134 I take to mean the dimensions of the X-Y square that the horizontal points are plotted on. Does the point solution take out those 15-20 obvious outliers in the northwest corner? Is the "final" point position (in terms of the way a Trimble controller shows it) 0.03/0.03?
Sorry for all the Trimble references - up until a month ago it's all I've ever used and I'm trying to "translate" their terms to the LS.
What is the default map tool (comparable to what's on the Trimble units)? For example, after I key in some points, what's the best way to visually see how they all lay out? I know that many screens include a map, but what's a "best practice"?
Check out the attached screenshot. I'm still trying to get used to what I'm seeing. If I understand correctly, this one shows the peak-to-peak errors of the 6 RTK engines being 0.108 - What does the 2/2:2 refer to? The 0.134 I take to mean the dimensions of the X-Y square that the horizontal points are plotted on. Does the point solution take out those 15-20 obvious outliers in the northwest corner? Is the "final" point position (in terms of the way a Trimble controller shows it) 0.03/0.03?
Sorry for all the Trimble references - up until a month ago it's all I've ever used and I'm trying to "translate" their terms to the LS.
Attachments
Jim Frame
Well-Known Member
Set up the base, make the Triumph-2 an external receiver on the Triumph-LS.
How does one do this? And is it faster to switch the configuration than to physically swap receivers on the base tripod (which is what I've been doing)?
A screen protector shouldn't be neccessary. To see the map Collect or Stake>Review. The Collect Action screen is explained in the Quick Start Guide:



All the epochs shown on the horizontal and vertical plots are included in the average for the final coordinate of the point. 0.03/0.03 ft are the HRMS and VRMS in your screenshot, probably similar to what Trimble shows.
All the epochs shown on the horizontal and vertical plots are included in the average for the final coordinate of the point. 0.03/0.03 ft are the HRMS and VRMS in your screenshot, probably similar to what Trimble shows.
How does one do this? And is it faster to switch the configuration than to physically swap receivers on the base tripod (which is what I've been doing)?
System>Connection Setup>Receiver Connection>External receiver>Connect using Bluetooth>select T2 and press Connect
This should be faster than physically switching the units I think.
Aaron S
Active Member
Matt - thanks for the very helpful screenshots. Would you say that if I have a horizontal plot that includes a few wild outliers, it would be best to re-shoot it over again until I get a nice tight circular/oval grouping?
I understand what they're saying with the number of RTK engines stat, but what about fractions? My screen shows 2/2:2 and your example has 1/2:2... there can't be a half an fix can there?
Another thing I don't understand about the LS is the 6 RTK engines. If each of the engines works like an separate GPS unit, why don't they all come up with the same answer, since they are all connected to the same single antenna at the same time?
Thanks again - this kind of service and support is what sets Javad so far ahead of the others!
I understand what they're saying with the number of RTK engines stat, but what about fractions? My screen shows 2/2:2 and your example has 1/2:2... there can't be a half an fix can there?
Another thing I don't understand about the LS is the 6 RTK engines. If each of the engines works like an separate GPS unit, why don't they all come up with the same answer, since they are all connected to the same single antenna at the same time?
Thanks again - this kind of service and support is what sets Javad so far ahead of the others!
I understand what they're saying with the number of RTK engines stat, but what about fractions? My screen shows 2/2:2 and your example has 1/2:2... there can't be a half an fix can there?
Number of Engines Fixed /Number of Engines required (Phase 1) : Number of Engines required (validate phase)
Another thing I don't understand about the LS is the 6 RTK engines. If each of the engines works like an separate GPS unit, why don't they all come up with the same answer, since they are all connected to the same single antenna at the same time?
They are based on different algorithms.
Aaron, I am also a new user and all these guys have been helping me through the learning curve. Concerning your question #4 of the original post, I have been experimenting with DPOS and RTN or more correctly, just using the LS with RTN and no base. I have submitted the LS raw file only to DPOS and DO get a solution. It is more like a long opus-rs occupation for a decent solution, but it can be done.
Being a new user, I was not aware DPOS was designed for a LS and base (2 raw file) upload and solution. I will be following up on my first post on the DPOS section of the forum.
John
Being a new user, I was not aware DPOS was designed for a LS and base (2 raw file) upload and solution. I will be following up on my first post on the DPOS section of the forum.
John
Charles Craft
Member
AaronI have a demo unit that I'm trying out and have many misc. questions that an experienced user should be able to answer easily so I'll just post them all at once instead of many topics:
1. What is the best way to inverse between two points? Say I just want to know the bearing & distance between point #100 and #105.
2. I am constantly getting an interference warning on my unit. It doesn't matter if I'm in the parking lot, or a mile into the forest away from all electricity. Is there anything specific that causes this? I goes away sometimes even if I don't move it - in other words, it comes and goes seemingly at random.
3. When staking out a point/line, can I switch the display deltas to north/east, rather than left/right/ahead/back?
4. Can I use DPOS when running the rover off of RTN, or do I need to be connected to my own local base?
5. The wireless hotspot I use (Verizon) has a SIM card in it - can I swap this into one of the SIM card slots on the LS for RTN corrections?
6. Is there a feature in COGO to proportion a point on a line? It would be nice to punch in the original GLO chainage and have it compute the corners along a line.
7. Is there a need for any kind of office software (similar to Trimble Business Center) that I can use to visually QC/QA my points, or do the internally generated reports serve that purpose?
8. How is it possible for this unit to perform as well as a Trimble R10, yet cost half as much - especially when you figure in the cost of the controller. I am loving this unit would love to buy it instead of an R10, but I keep asking myself "what's the catch?"
Many questions - thanks for your time.
I spent years trying to find the catch. I am now convinced that there is no catch. Now I just enjoy my Triumph LS and TR-2. Just wish I had bought sooner. I am just too old to learn fast.
Charles
Aaron S
Active Member
Aaron
I spent years trying to find the catch. I am now convinced that there is no catch. Now I just enjoy my Triumph LS and TR-2. Just wish I had bought sooner. I am just too old to learn fast.
Charles
To be perfectly honest, the J-Field software is nowhere near as intuitive or user friendly as Trimble Access. However, in the long run, I think it really will prove to be superior, especially considering the updates and input from users that Javad implements. When is the last time Trimble really improved on their controller software? It's pretty much the same now as it was in the TSC-e days, not much improvement. Interface issues aside, the more I use my LS, the more I love it. Their attention to detail is incredible. I haven't cracked open my TSC-3 in weeks.